
Module Gyroscope et Accéléromètre 6 Axes MPU6050
Module MPU6050 – Gyroscope et accéléromètre 6 axes pour vos projets robotiques, drones et Arduino.
Description
Module Gyroscope et Accéléromètre 6 Axes MPU6050
Description courte :
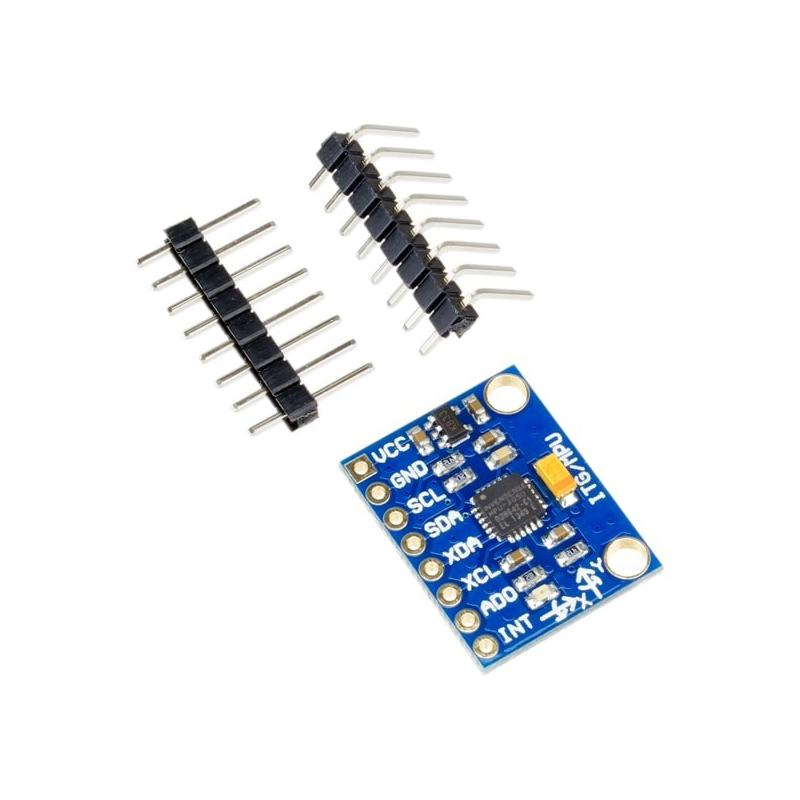
Le MPU6050 est un module 6 axes combinant un accéléromètre 3 axes et un gyroscope 3 axes. Idéal pour la détection de mouvements, d’orientation et de vibrations dans vos projets Arduino, drones, robots, etc.
Caractéristiques techniques :
– Capteur 6 DOF (Degrees Of Freedom)
– Accéléromètre : ±2g, ±4g, ±8g, ±16g
– Gyroscope : ±250, ±500, ±1000, ±2000 °/s
– Communication : I2C
– Alimentation : 3.3V à 5V
– Horloge interne 8 MHz
– Intégration possible avec DMP (Digital Motion Processor)
– Faible consommation d’énergie
Brochage typique :
– VCC → 3.3V ou 5V
– GND → Masse
– SDA → Données I2C
– SCL → Horloge I2C
– INT → Interruption (optionnelle)
Exemple de code Arduino (I2C) :
Utilise la bibliothèque MPU6050 d’i2cdevlib.
#include
#include
MPU6050 mpu;
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("Connexion au MPU6050 échouée");
while (1);
}
}
void loop() {
int16_t ax, ay, az, gx, gy, gz;
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
Serial.print("Accel: ");
Serial.print(ax); Serial.print(" ");
Serial.print(ay); Serial.print(" ");
Serial.print(az); Serial.print(" | Gyro: ");
Serial.print(gx); Serial.print(" ");
Serial.print(gy); Serial.print(" ");
Serial.println(gz);
delay(500);
}
Applications :
– Détection d’inclinaison et de mouvement
– Systèmes d’équilibre (robots, véhicules)
– Interfaces gestuelles
– Contrôle de drones et d’IMU
– Projets de réalité virtuelle ou augmentée









There are no reviews yet.