Description
Module Gyroscope, Accéléromètre et Magnétomètre 9 Axes MPU9250
Description courte :
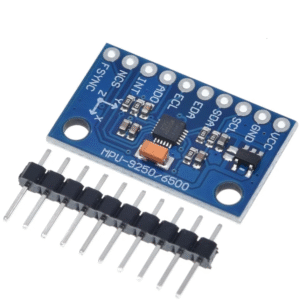
Le MPU9250 est un capteur IMU 9 axes combinant un accéléromètre 3 axes, un gyroscope 3 axes, et un magnétomètre 3 axes. Il est idéal pour les projets nécessitant une détection complète de mouvement et d’orientation comme les drones, robots ou casques VR.
Caractéristiques techniques :
– Capteur Inertiel 9 DOF (Degrees of Freedom)
– Accéléromètre : ±2g, ±4g, ±8g, ±16g
– Gyroscope : ±250, ±500, ±1000, ±2000 °/s
– Magnétomètre (AK8963) : ±4800 µT
– Interfaces : I2C (jusqu’à 400kHz), SPI (jusqu’à 1 MHz)
– Alimentation : 3.3V
– Intégration DMP (Digital Motion Processor)
– Très faible consommation
– Format compact (breakout board)
Brochage typique :
– VCC → 3.3V
– GND → Masse
– SDA → Données I2C
– SCL → Horloge I2C
– NCS / AD0 → Sélection SPI ou adresse I2C
– INT → Interruption (facultative)
Exemple de code Arduino (I2C) :
Utilise la bibliothèque MPU9250 (SparkFun ou autre compatible).
#include
#include
MPU9250_DMP imu;
void setup() {
Serial.begin(115200);
Wire.begin();
if (imu.begin() != INV_SUCCESS) {
Serial.println("Échec d'initialisation du MPU9250");
while (1);
}
imu.setSensors(INV_XYZ_GYRO | INV_XYZ_ACCEL | INV_XYZ_COMPASS);
imu.enableFifo(true);
imu.setGyroFSR(2000); // ±2000 dps
imu.setAccelFSR(2); // ±2g
imu.setLPF(5); // 5Hz low-pass filter
}
void loop() {
if (imu.fifoAvailable()) {
imu.dmpUpdateFifo();
Serial.print("Yaw: "); Serial.print(imu.yaw);
Serial.print(" Pitch: "); Serial.print(imu.pitch);
Serial.print(" Roll: "); Serial.println(imu.roll);
}
delay(500);
}
Applications :
– Systèmes de navigation inertielle (IMU)
– Drones et véhicules autonomes
– Projets de réalité augmentée ou virtuelle (VR/AR)
– Robots équilibrés et gyroscopiques
– Suivi de mouvement et orientation 3D

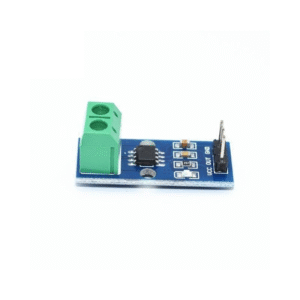 Capteur de Courant 30A ACS712
1 × TND 7,90
Capteur de Courant 30A ACS712
1 × TND 7,90  Module Capteur de Température et d’Humidité DHT22
1 × TND 16,00
Module Capteur de Température et d’Humidité DHT22
1 × TND 16,00 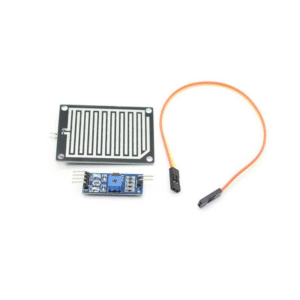 Capteur de Pluie avec Module de Détection – Compatible Arduino
1 × TND 6,00
Capteur de Pluie avec Module de Détection – Compatible Arduino
1 × TND 6,00  Module RFID RC522 avec Carte + Porte-Clé
1 × TND 10,00
Module RFID RC522 avec Carte + Porte-Clé
1 × TND 10,00 







There are no reviews yet.